Sample mounting
Sample Pillar
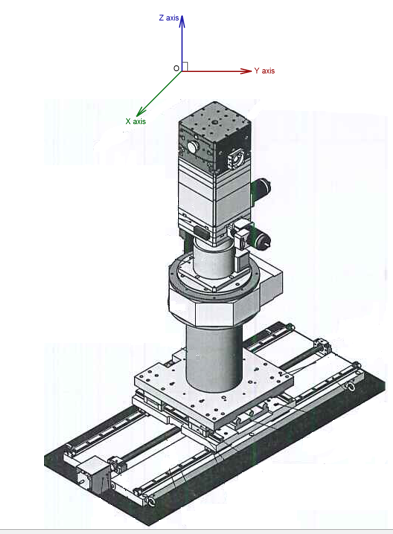
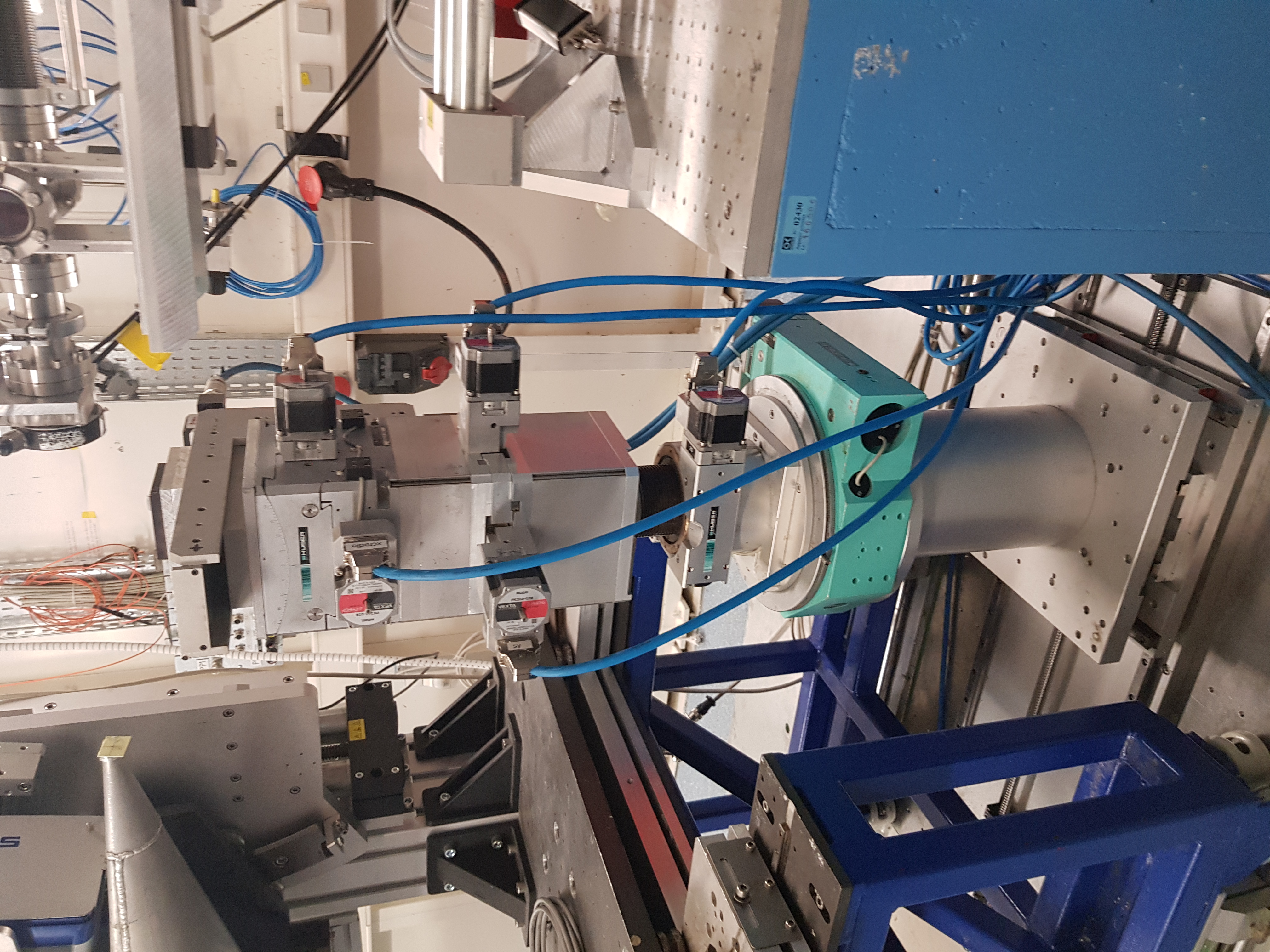
At BM26, the standard mounting for samples and sample environment is a sample pillar with motorised translation and rotation movements.
All positions refer to a right handed reference system, with z the VERTICAL direction, x the direction ALONG the BEAM, positive y direction POINTING OUT of the wall closer to the synchrotron ring.
The detailed technical sheet of the sample pillar can be found here here. Below essential useful information.
 |
 |
Sample pillar is equipped with a number of translational and rotational motors. Respectively, use:
mv name_of_motor 10 mvr name_of_motor 10 ascan name_of_motor 10 20 30 0.5 dscan name_of_motor -5 5 10 0.5
for absolute move of 10, relative move by 10, absolute scan from 10 to 20 with 30 steps (0.5 seconds per step), relative scan by +/- 5 with 10 steps (0.5 seconds per step; relative scan brings back motor to initial position) of the motor.
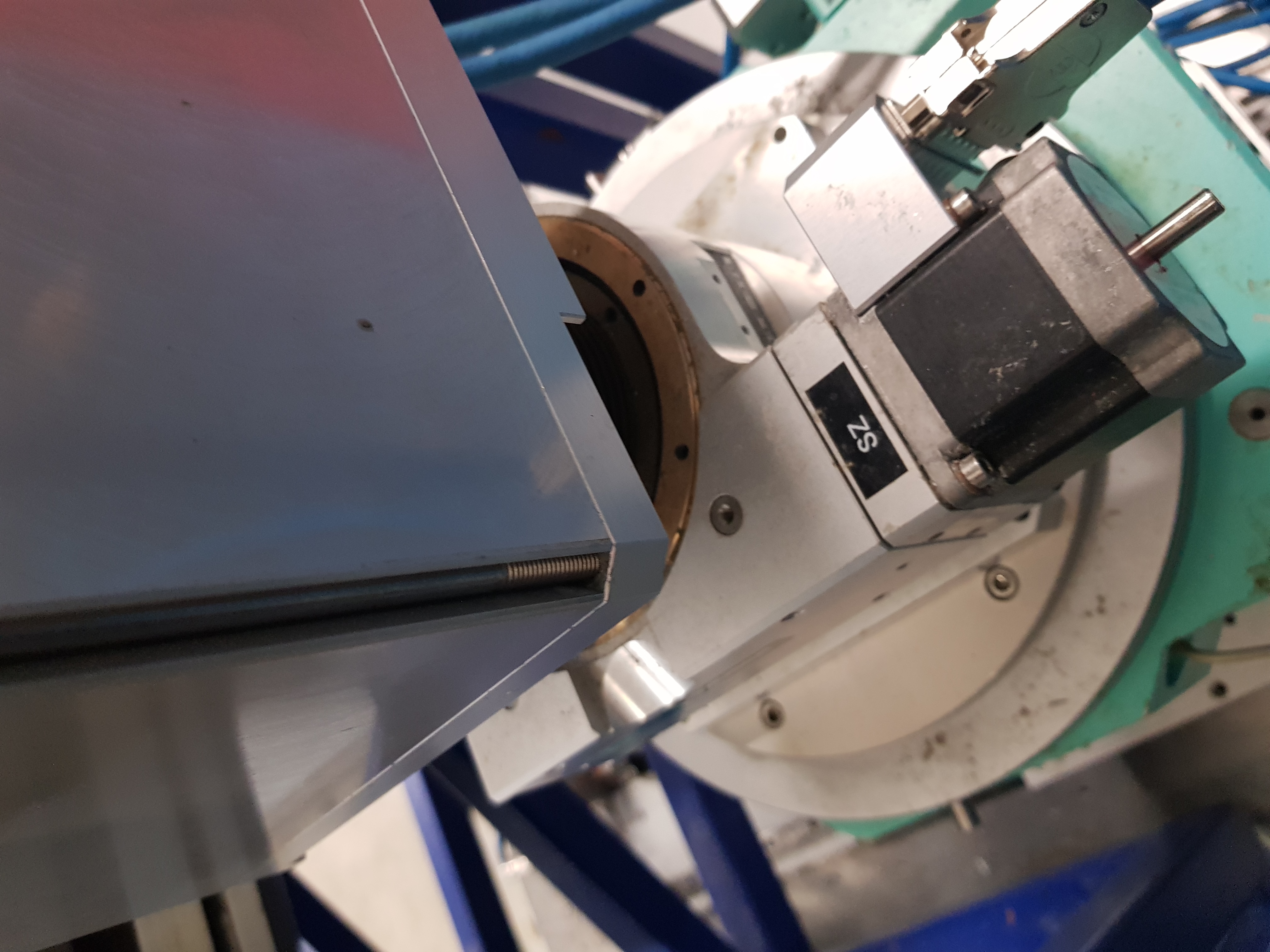
sx, sy, sz translations:
 |
 |
 |
|
sx |
sy |
sz |
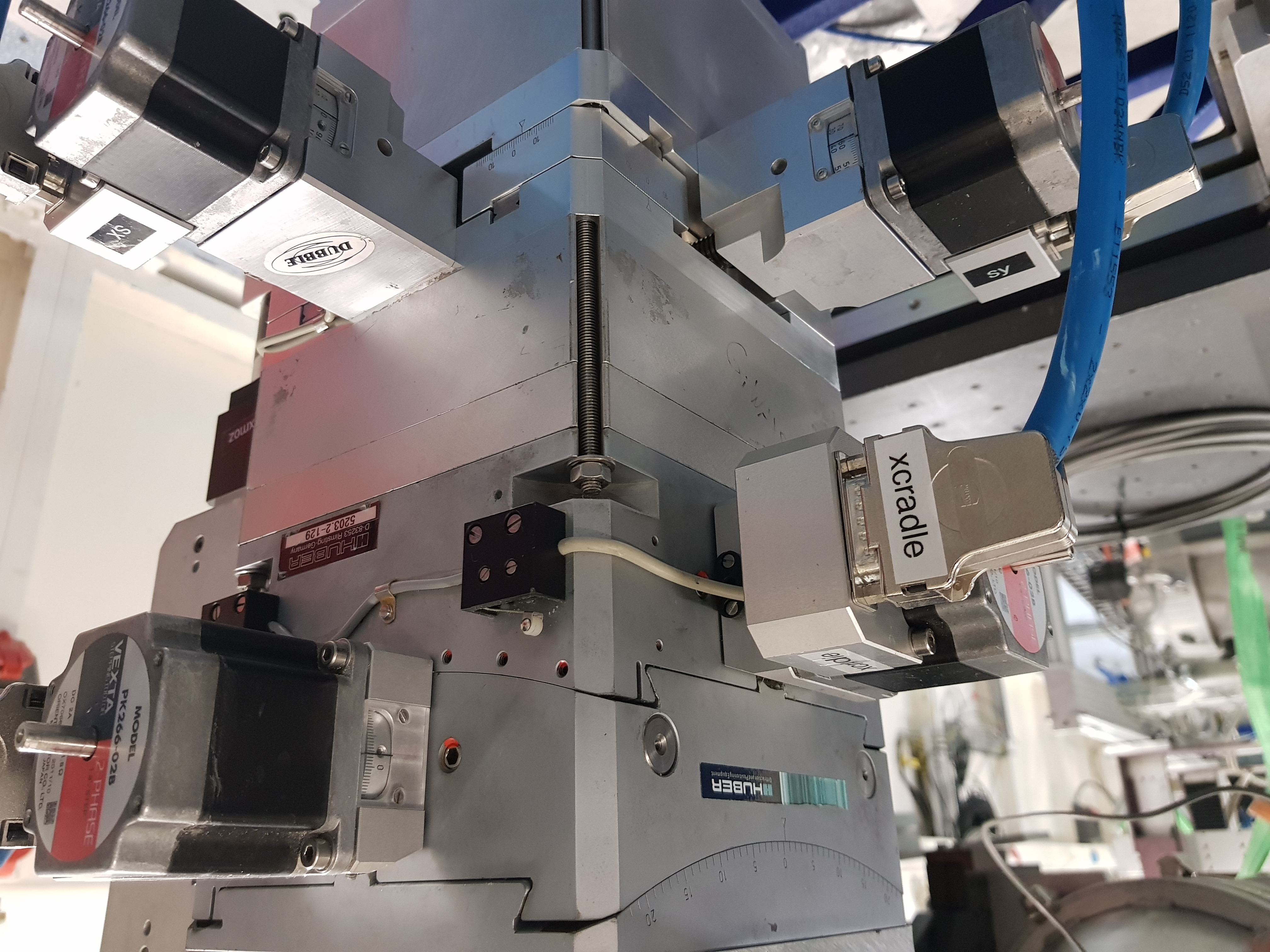
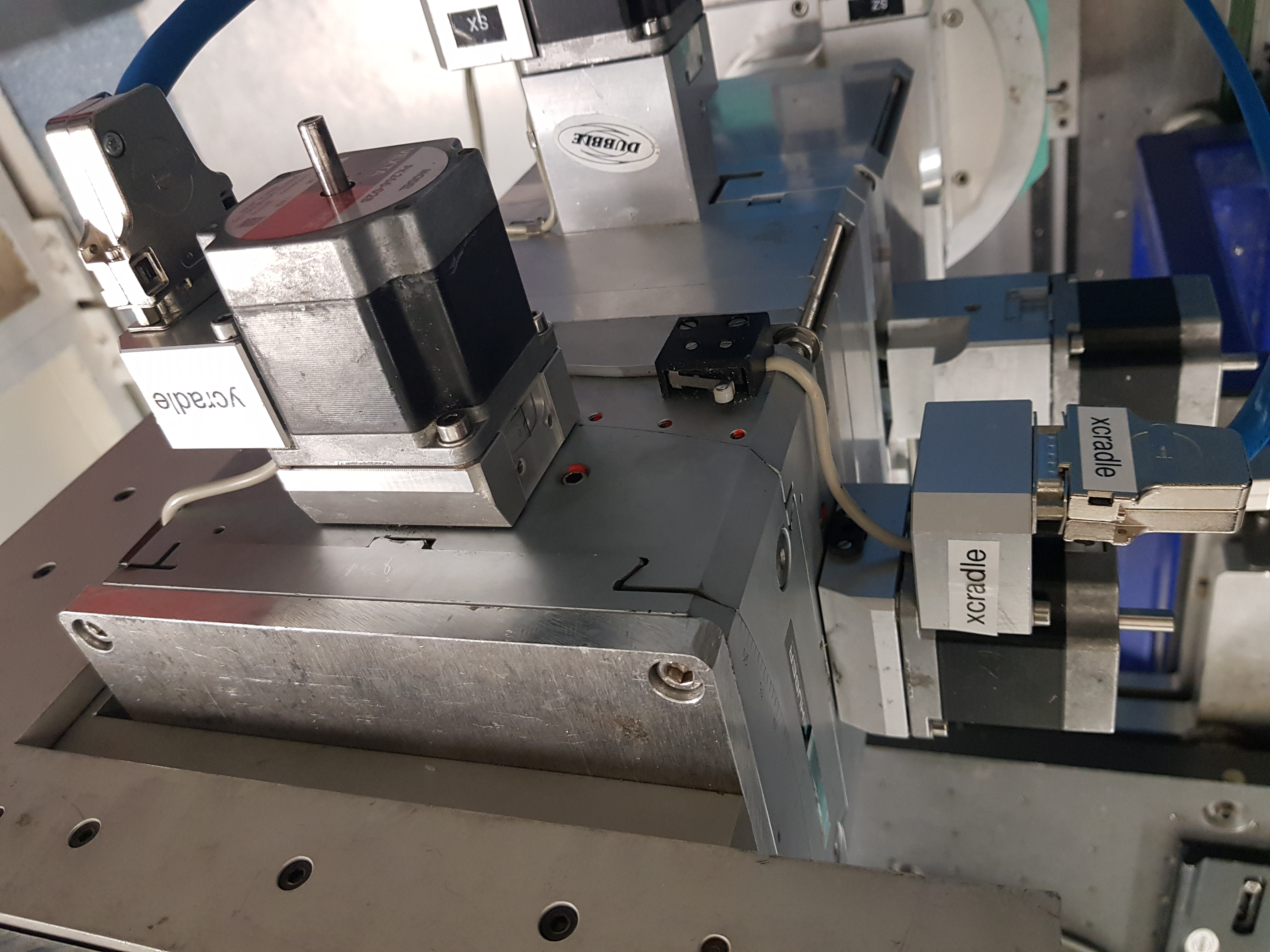
X and y cradle rotations:
 |
 |
|
xcradle: |
ycradle: |
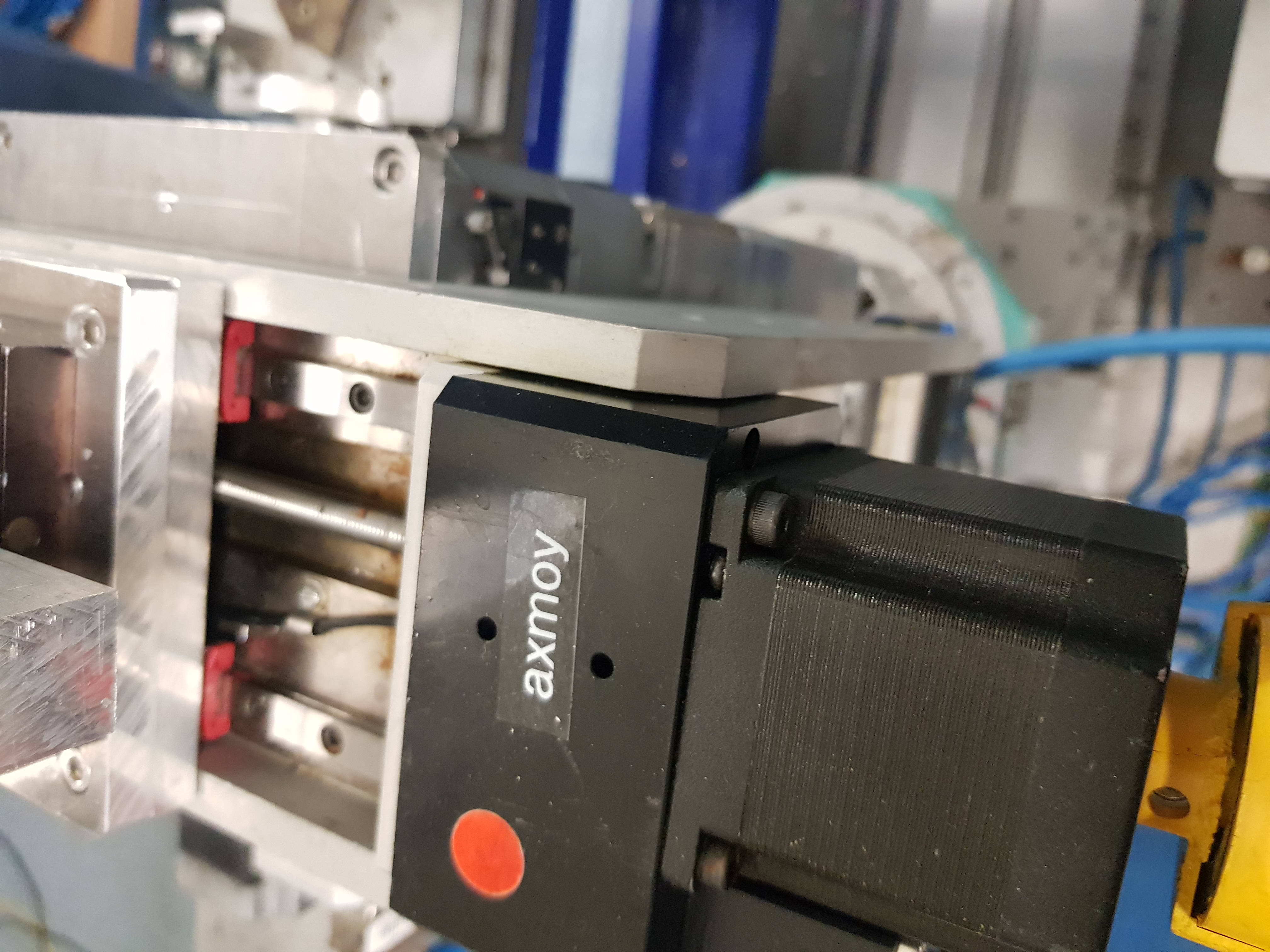
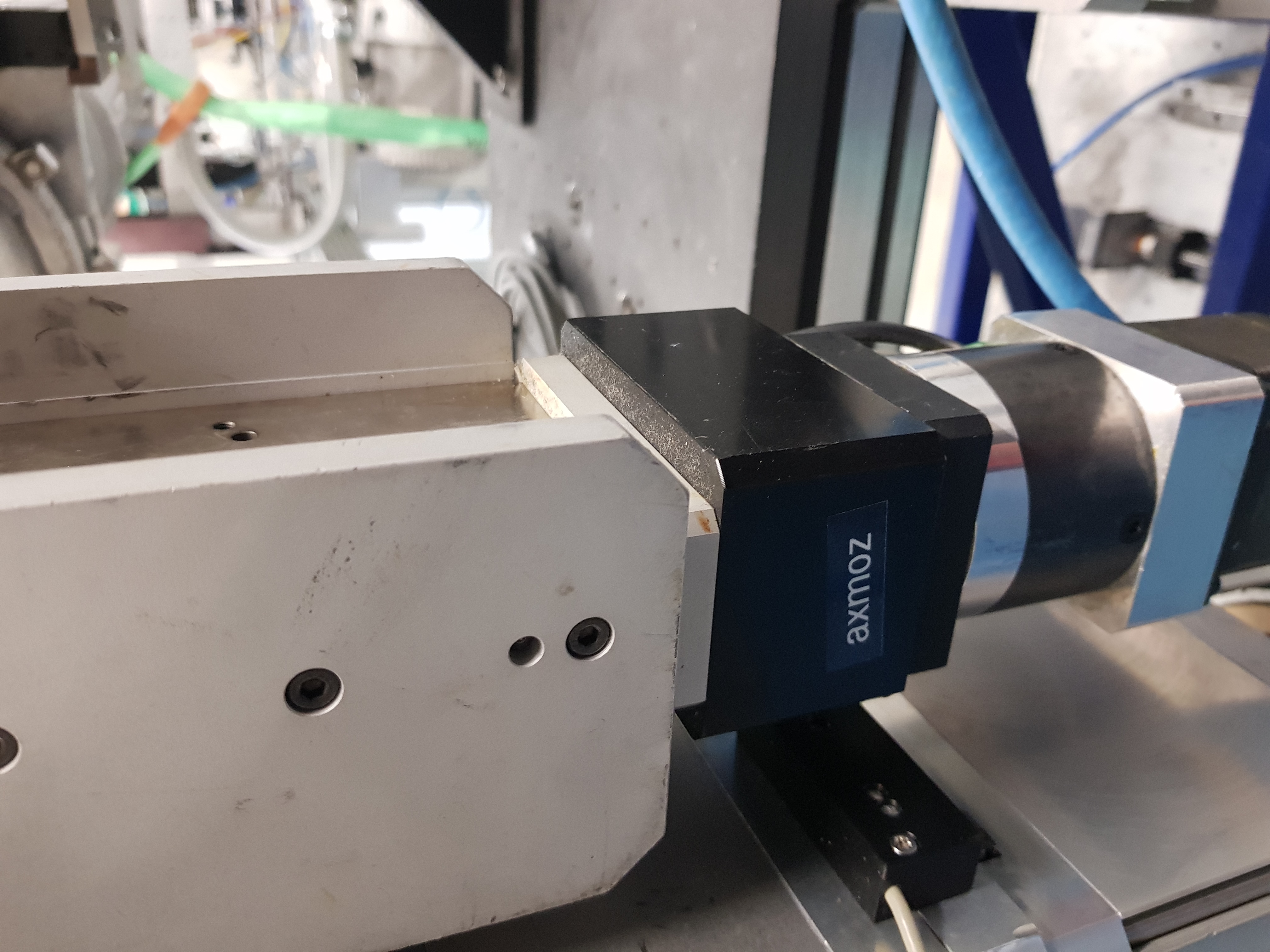
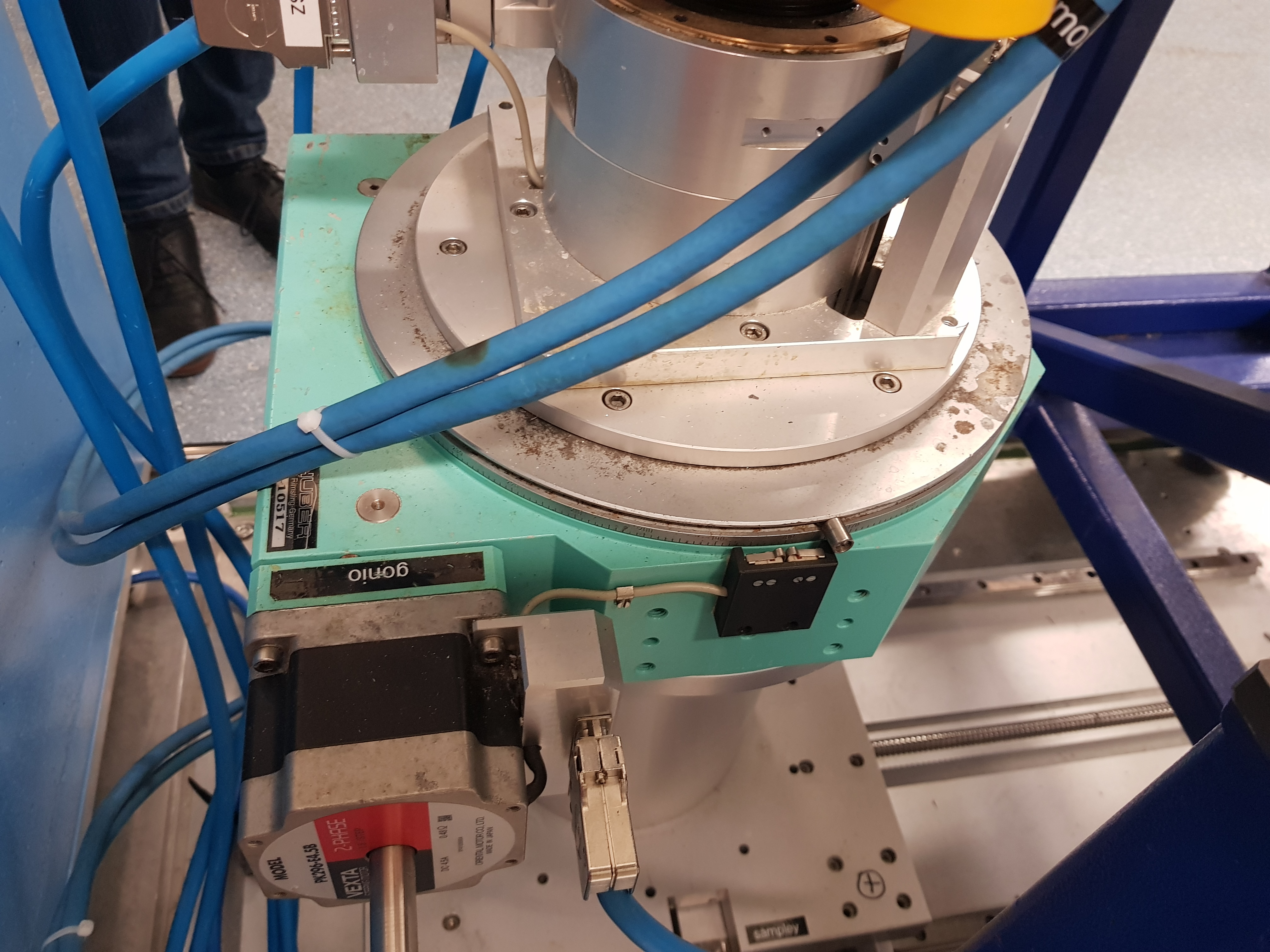
Axmoz, Axmoy, sampley translation, Gonio rotiation:
 |
 |
|
axmoy translational table |
axmoz translational table |
 |
 |
|
Gonio |
Sampley |
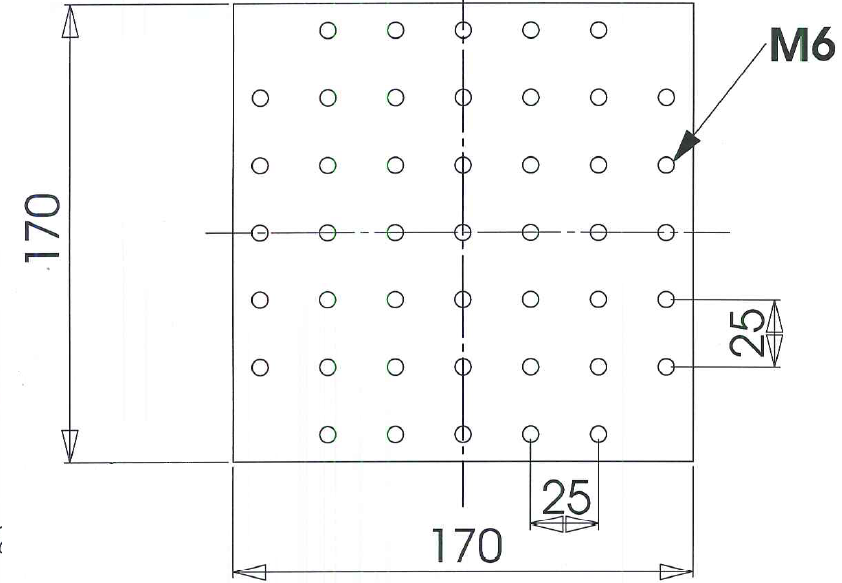
2-Circle HUBER stage:

We use M6 screws with 25mm spacing, see this picture below:
Sample Pillar motors' specifications
 |
 |
 |
Kinematic Base / Magnetic Plate
 |

|
|
Kinematic base KB3X3 Square Base with a Central 1/4"-20 (M6) Through Hole See Thorlabs |
Mount sample environment on magnetic plate. If your sample is small enough to fit on the plate, you can use it for your experiment. Easy to change samples and standardized. |
partners



European Synchrotron Radiation Facility - 71, avenue des Martyrs, CS 40220, 38043 Grenoble Cedex 9, France.