Sample Changer
The SC needs to be in a specific position to load (gripper cooling in the dewar). If it is in the home position
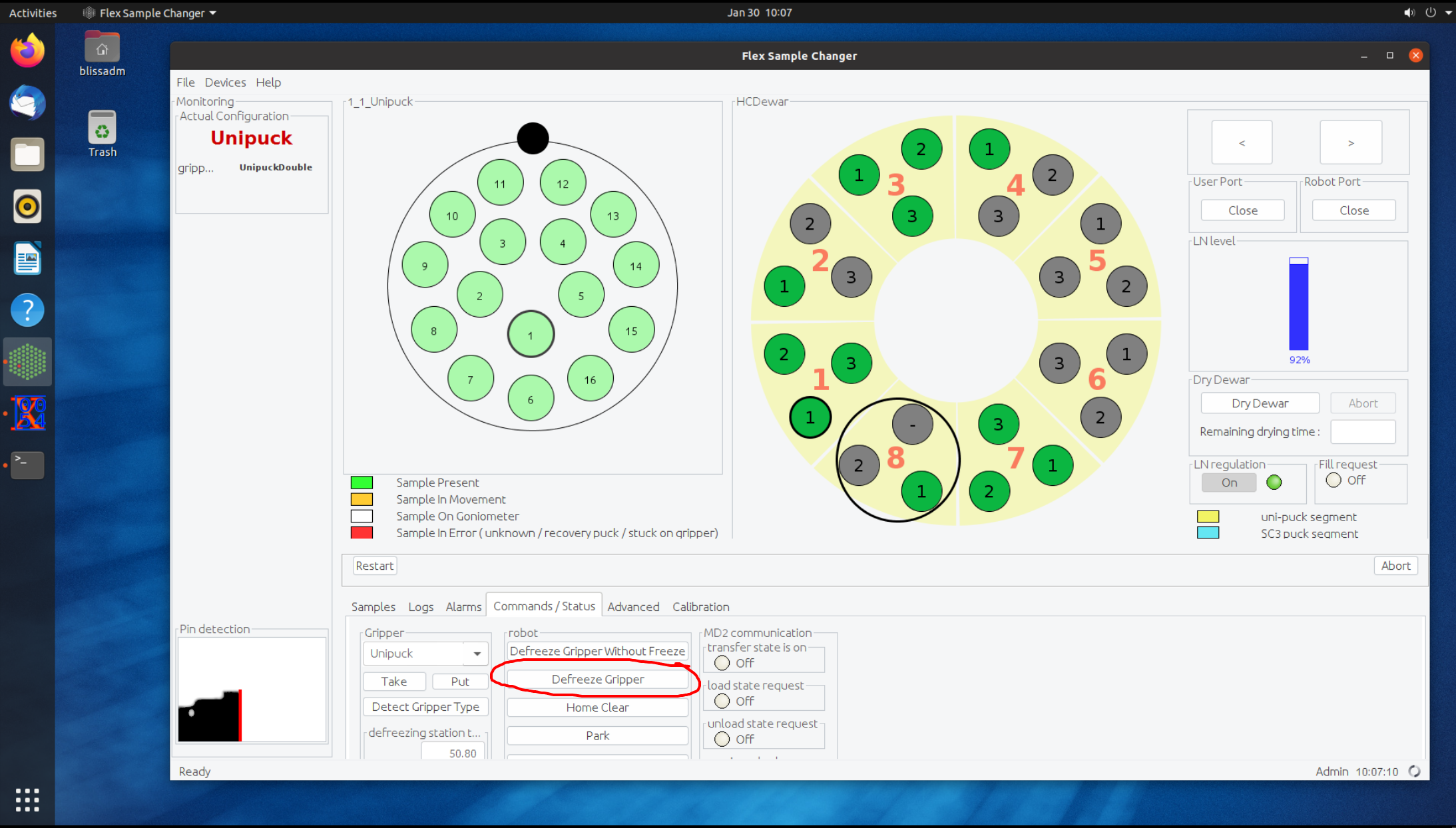
(it is above the defreezing station) or anywhere *except* in the dewar, in SC Tools, Defreeze Gripper. If it will not Defreeze the gripper, first Home, then Defreeze.
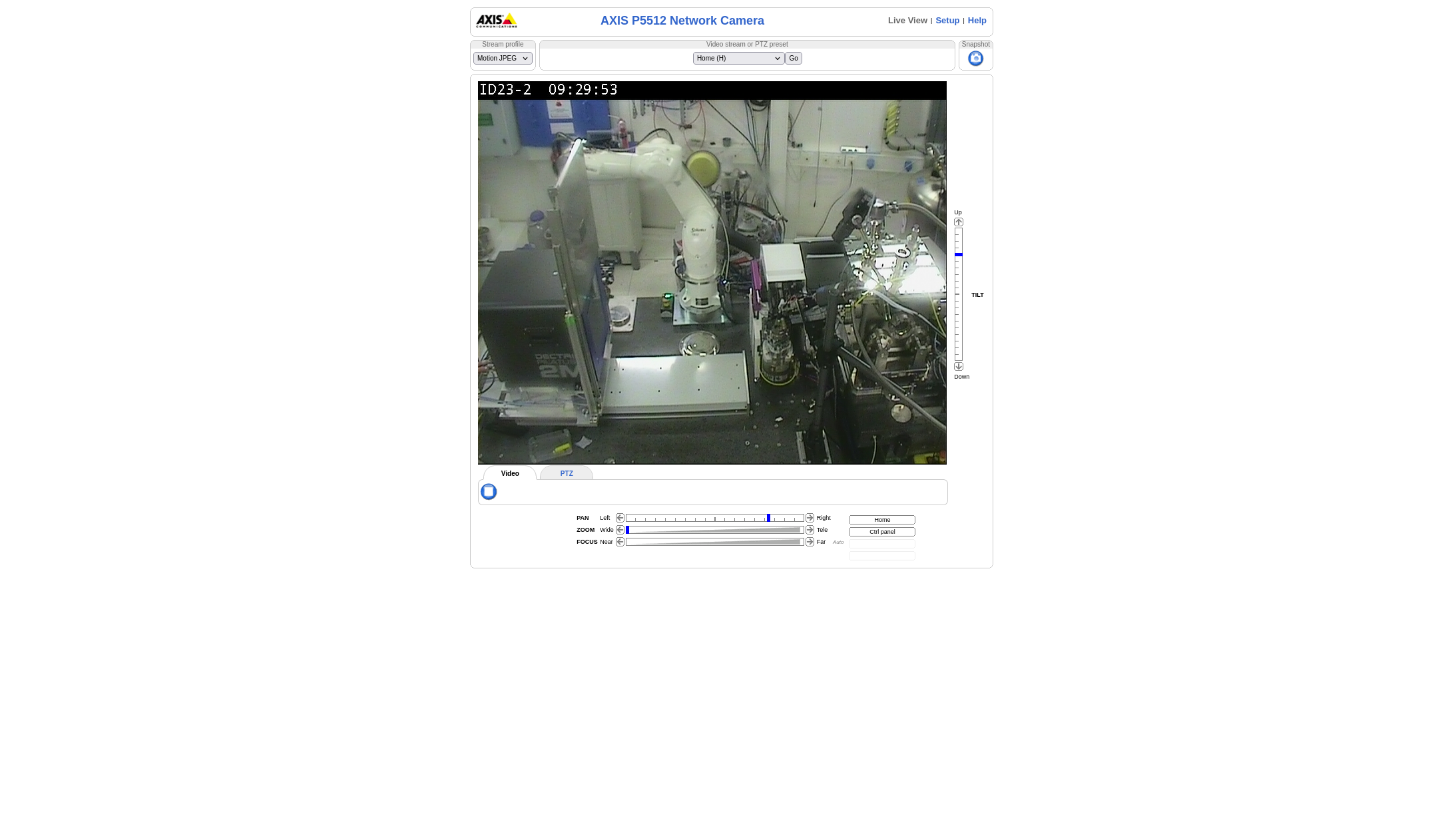
It is important to watch what the robot is doing during loading and loading and escpecially when debugging any problems. Point your browser (from within an NX or remote.esrf.fr (connect as your personal credentials, then compute cluster, rnice, then start a browser to http://160.103.43.83/view/viewer_index.shtml?id=250.
If the Home from mxcube does not work (robot dows not move), try
- logging out and logging in to mxcube and trying again
- Restarting the mxcube server
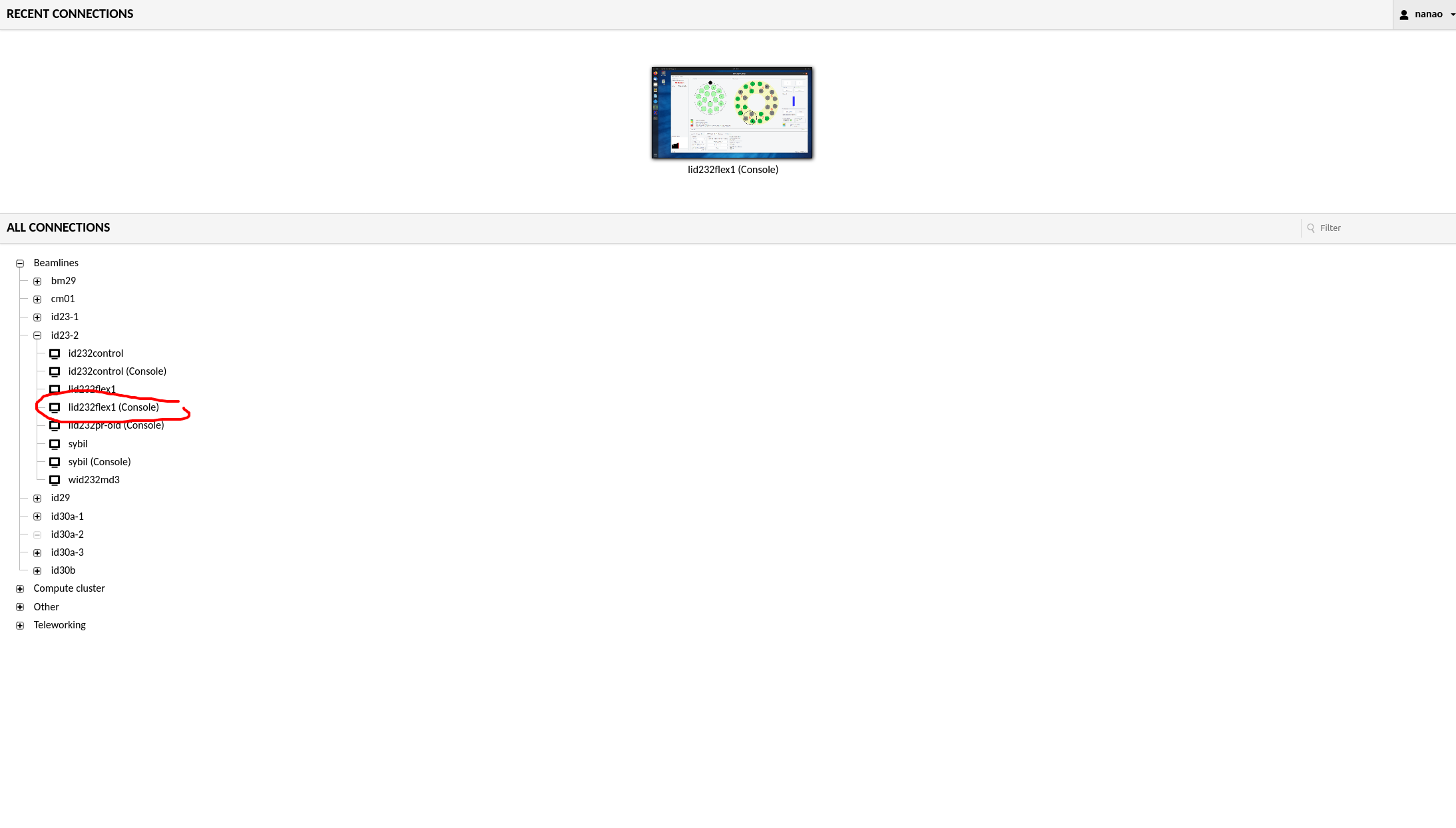
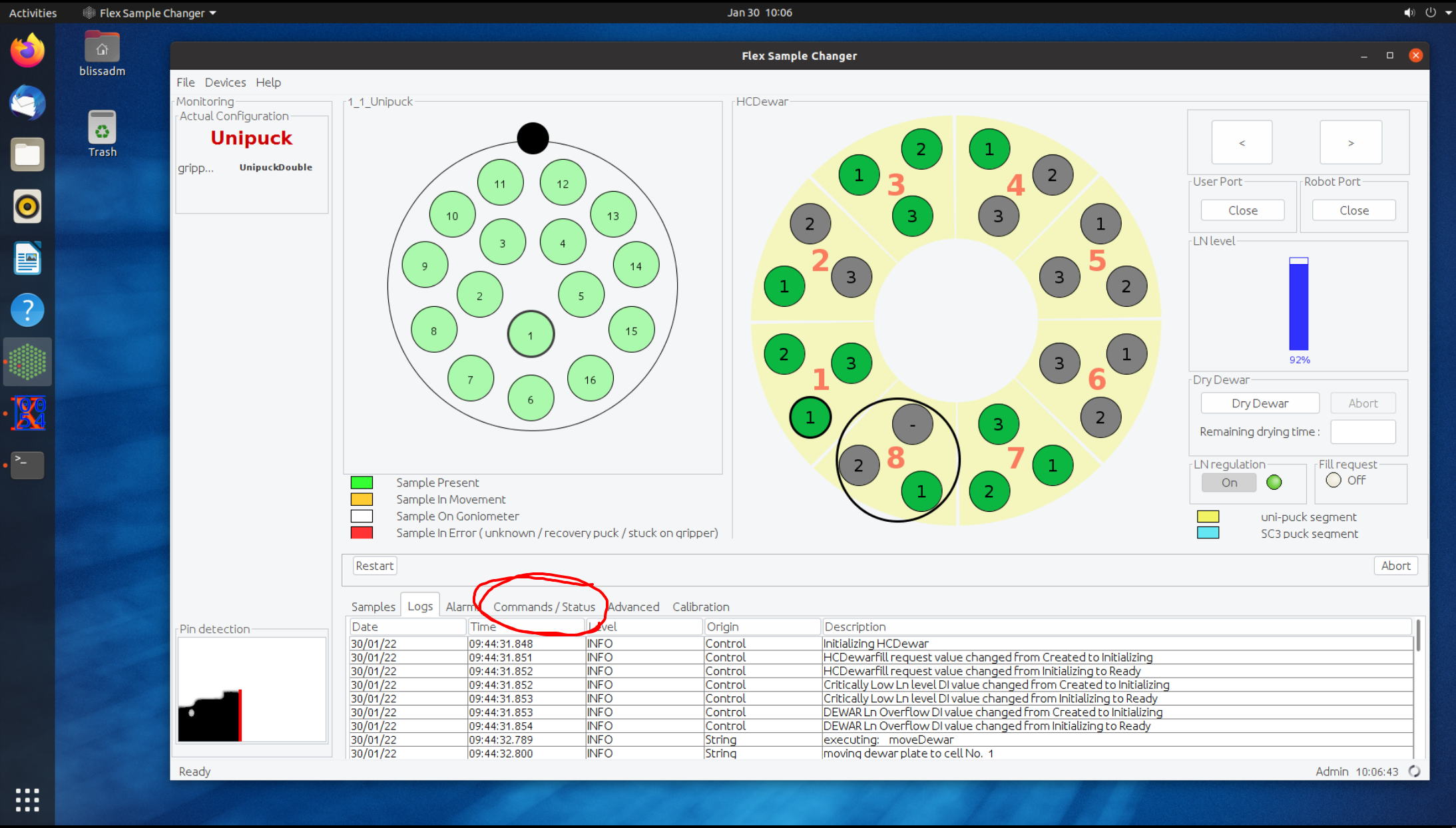
- Connect via remote.esrf.fr to lid232flex1, commands panel, then HomeClear, then Defreeze gripper. You can also connect to id232control and there will usually be a firefox window already connected to the flex machine.
Some "Sample Changer" problems can be caused by other issues. First confirm that the motors are all green in (Make sure to "Show Motors" to see all the motors) MxCube and that you can move the motors in bothe the microdiff software and mxcube. Confirm that the microdiff software is "Ready". Put the light in -- does the image change? If not, you will need to kill the LimaCCDs server and then start it
(and then restart mxcube). Note that Lima problems are quite rare now that the power supply has been moved to a seperate circuit.
By clicking on "ShowSC details" in MXCube some functionalities of the FlexHCD can be accessed for basic troubleshooting:
1 - Abort: Stops any robot operation immediately. When executed it is necessary to do a homing followed by gripper cleaning
2 - Home: performs a homing of the robot, needs to be followed by gripper cleaning
3 - Clean gripper: defreezing of the gripper followed by refreezing. Robot arm needs to be in "home" position to start this operation.
4 - Trash Sample: Throws the current sample on goniometer away
- I entered the hutch while the robot was moving
- Robot is stuck/not moving
- MXCuBE shows a sample mounted but no sample is on gonio
I entered the hutch while the robot was moving
- Don't do this again.
-
Close the hutch. On the SC tab in MXCube click on "Abort" then "Home" and when the homing is finished on "Defreeze gripper".
- Check that you can move all motors and change phase in the microdiff.
- Check to make sure that the robot is not moving on the hutch cameras ( http://160.103.43.83/view/viewer_index.shtml?id=421 in NX). If it is not moving, in the SC tab in MXCube click on "Abort" then "Home". If the homing movement is successful click on "Defreeze gripper".
- If this does not help: Close MXCuBE3, kill the mxcube3 server (stop-mxcube from a sybil window) and restart the flex device server by using remote.esrf.fr to connect to lid233flex -- note that this is almost never necessary.
- If this still does not help: check if any of the Robot emergency button has been pressed (on the experimental table, on the robot control pad) lift it back. Rearm the electronic rack at the very end of the experimental hutch, restart device server as described above
- If this still does not help: Turn off and on the electronic rack, wait until the barcode reader of the flexHCD flashes, and rearm the electronic rack, restart the device server.
- Note that the microdiffractometer could also be the source of problems because it must move to specific position before loading. Check that you can move motors (e.g. Omega, sampx, sampy) in MXCuBE. If the fields are orange or you cannot move them, there is likely a diffractometer problem. See the Diffractometer troubleshooting if this is the case.
Note: restarting the flex device server sometimes crashes the MXCube in the experimental hutch, it needs to be restarted in order to access the sample changer content.
MXCuBE shows a sample mounted but no sample is on gonio
- Click on Reset Sample in the SC detail tab
- Carry on
Robot will not pick up samples
- Confirm that there really is a sample in that cell, puck and position (Actually go in and look!)
- If the sample has some problem (bent pin, too much glue, non SPINE cap, sample stuck to the plate, sample not sitting well on the plate) it will become black listed by the SC software and you will not be able to load this sample. Unfortunately MXCUBE does not report this error but the SC will simply not try to load this sample in the future and you will have to reload mxcube3.
- If sample is there, it is likley that the gripper has gotten iced. Try "Clean Gripper" in the SC details tab
- In some cases, even 2) does not work, which means that the gripper must be cleaned by hand with paper towels. Let is warm up first. Repeat 2)
Pucks not gettting detected
1)Change the proxisense configuration in the sample changer software to "simulation" (you must "edit") first
OR
Fix the detection levels.
- Make sure the affected position is empty
- Read the phase
- set the "empty" value to this phase value
- insert a unipuck (BASE ONLY)
- read phase
- set this phase to the unipuck value
----------------------------------------
Operating the sample changer with the teach pendant: ONLY FOR LOCAL CONTACTS!
This might be necessary in case the robot arm gets stuck in a position where no automatic recovery via homing in MXCube is possible, maybe due to a power cut by breaking the PSS interlock or due to a collission. If this has happened you should try to bring the robot am in close proximity to the 'home' position. When this position is reached the hutch interlock needs to be activated again and with a homing followed by cleaning gripper from MXCube the robot should be operational again.
Attention: this operation is potentially dangerous as it could damage both material and operator. Please do this only after you have been instructed by an experienced personand be extremely careful!
- Press and hold the dead man switch
- Switch on the robot arm power on the teach pendant
- Select a jog mode: the top one is suggested
- Move the axis of the robot one by one with the respective buttons
Changing the user:
On the tech pendant press shift + user, followed by return. in the list of users select 'remote' with the arrow keys, press enter and OK. With this settings the robot can be controlled by MXCube.
Changing the robot speed: During manual operation the maximum speed of the robot motors are set to 10%. If this setting persists the grey and black +/- buttons can be used to change the speed. The current setting is shown in the top line of the display.
partners



European Synchrotron Radiation Facility - 71, avenue des Martyrs, CS 40220, 38043 Grenoble Cedex 9, France.